1. Короткий ответ для тех, кто спешит
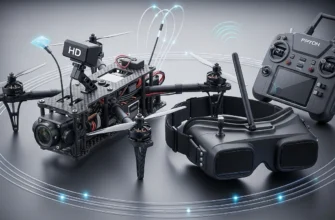
FPV-дрон — это дрон для ручного пилотажа, где пилот управляет полётом напрямую и видит мир «глазами дрона».
Обычный дрон — это стабилизированная летающая платформа, чаще всего с камерой, которая сама удерживает положение в воздухе и помогает пилоту не ошибаться.
Это не два режима одного устройства, а два разных класса с разной логикой полёта, управления и применения. Они решают разные задачи и требуют разного подхода от пилота.
Если упростить:
FPV — это управление движением.
Обычный дрон — это управление результатом (положением и картинкой).
2. Принципиальная разница: как пилот «чувствует» дрон
FPV: дрон как продолжение рук пилота
В FPV-полёте дрон не думает за пилота. Он выполняет ровно то, что задают стики управления: угол, скорость вращения, направление.
Если пилот отпустил управление — дрон не выравнивается сам.
Пилот чувствует:
- инерцию
- ускорение
- наклон
- потерю высоты
FPV-дрон ведёт себя как физический объект в пространстве, а не как «умная платформа».
Обычный дрон: управляемая система
Обычный дрон постоянно анализирует своё положение:
- удерживает горизонт
- стабилизирует высоту
- компенсирует ветер
- ограничивает резкие движения
Пилот задаёт куда, а не как именно.
Система сглаживает ошибки и не даёт выйти за безопасные пределы.
Почему очки — не главное отличие
FPV-очки часто считают ключевым признаком. Это ошибка.
Главное отличие — алгоритмы управления и стабилизации, а не способ просмотра картинки. Можно летать FPV и без очков, и наоборот — это не меняет сути.
3. Управление и стабилизация: ACRO vs assisted flight
Что означает отсутствие стабилизации
В FPV-режиме (часто называемом acro):
- дрон не выравнивается
- не «зависает» в воздухе
- не останавливается сам
Любое движение продолжается, пока пилот его не скорректирует.
Это требует постоянной работы стиками.
Почему FPV не может «просто висеть»
Чтобы висеть, нужно:
- удерживать точный угол
- компенсировать тягу
- учитывать ветер и инерцию
FPV-дрон этого не делает автоматически.
Висение возможно, но это активное действие пилота, а не состояние по умолчанию.
Почему обычный дрон прощает ошибки
Ассистированные режимы:
- ограничивают углы наклона
- сглаживают резкие команды
- автоматически стабилизируют положение
Это снижает нагрузку на пилота и делает полёт предсказуемым даже без навыков.
4. Скорость, манёвренность и физика полёта
Откуда берутся 100–150 км/ч
FPV-дроны:
- легче
- имеют прямую тягу без ограничений
- не ограничены программно по углу и ускорению
Они могут резко разгоняться, тормозить и менять направление.
Почему FPV летит «иначе»
FPV-полёт — это управление:
- вектором тяги
- углом корпуса
- инерцией
Дрон может:
- лететь боком
- лететь вверх ногами
- выполнять сложные траектории
Зачем обычному дрону ограничения
Ограничения нужны для:
- стабильной видеосъёмки
- защиты конструкции
- безопасности пользователя
Обычный дрон не предназначен для резкой аэробатики — и это осознанный выбор, а не недостаток.
5. Конструкция и философия надёжности
Ремонтопригодность FPV
FPV-дрон проектируется с учётом падений:
- открытая рама
- модульные компоненты
- простая замена деталей
Повреждение — это рабочий сценарий, а не исключение.
Модульность
Каждый узел:
- мотор
- контроллер
- камера
- антенна
может быть заменён отдельно, без «целостной» системы.
Почему падения — часть FPV-экосистемы
Это не про риск, а про философию:
- дрон — инструмент обучения
- конструкция допускает ошибки
- восстановление — часть процесса
Почему обычные дроны хрупкие, но предсказуемые
Они:
- закрыты корпусом
- интегрированы
- оптимизированы под стабильную работу
Зато:
- реже падают
- ведут себя одинаково
- требуют меньше технического вмешательства
6. Где FPV — правильный выбор
FPV оправдан, когда нужна:
- высокая скорость
- сложная траектория
- полёт в ограниченном пространстве
- точный контроль движения
Типичные сценарии:
- гоночные трассы
- динамичные пролёты
- технические задачи, где важна манёвренность
7. Где FPV — плохой выбор
Критически важно понимать ограничения.
FPV не подходит для:
- путешествий и спонтанных съёмок
- спокойной пейзажной видеосъёмки
- пользователей без подготовки
- коммерческих задач без опыта и страховки
В этих сценариях FPV усложняет задачу вместо того, чтобы помогать.
8. Сравнительная таблица
| Характеристика | FPV-дрон | Обычный дрон |
|---|---|---|
| Стабилизация | Отсутствует | Полная |
| Управление | Прямое, ручное | Ассистированное |
| Висение | Требует навыка | По умолчанию |
| Скорость | Очень высокая | Ограниченная |
| Манёвренность | Максимальная | Ограниченная |
| Кривая обучения | Крутая | Пологая |
| Ремонт | Модульный | Ограниченный |
| Основная цель | Полёт | Платформа |
9. Почему FPV-дрон — не «следующий уровень» обычного
Распространённый миф:
«Начну с обычного, потом перейду на FPV»
На практике это два разных пути.
Навыки:
- не переносятся автоматически
- требуют разного мышления
- формируют разные ожидания
FPV — не апгрейд, а альтернативный класс.
Как механическая коробка передач и автомат — разные подходы, а не ступени развития.
10. Вывод: как выбрать подходящий тип дрона
Выбор простой, если задать правильные вопросы:
Выбирайте FPV, если вам важно:
- управлять полётом вручную
- понимать физику движения
- работать с динамикой и траекторией
Выбирайте обычный дрон, если вам нужно:
- стабильное поведение
- предсказуемый результат
- минимальная нагрузка на пилота
Без эмоций и мифов:
это разные инструменты для разных задач.
Если цель понятна — выбор становится очевидным.